Lab Tour ICRA 025

We gave a lab tour for guests and colleagues attending ICRA 2025.

We gave a lab tour for guests and colleagues attending ICRA 2025.
Jun Ueda continues to serve as an external review member (Phase 1, the first 5 years) for Goal 3 (AI and Robotics) of Japan Science and Technology Agency (JST) Moonshot R&D Program.
Charles Hong has been selected for 2025 Outstanding Undergraduate Researcher Award from CoE. This will be awarded at the Spring Symposium on 4/17.
US Patent Application No.: 19/037,728 “Systems and Methods for Magnetic Resonance Imaging Guided Robotics” Filed: January 27, 2025 GTRC Reference No.: Divisional of 8246 Our Reference No.: GTRC8246DIV
Alexey and Charles are among only 1000 awardees this year (usually 2000 each year). NSF slashes prestigious PhD fellowship awards by half
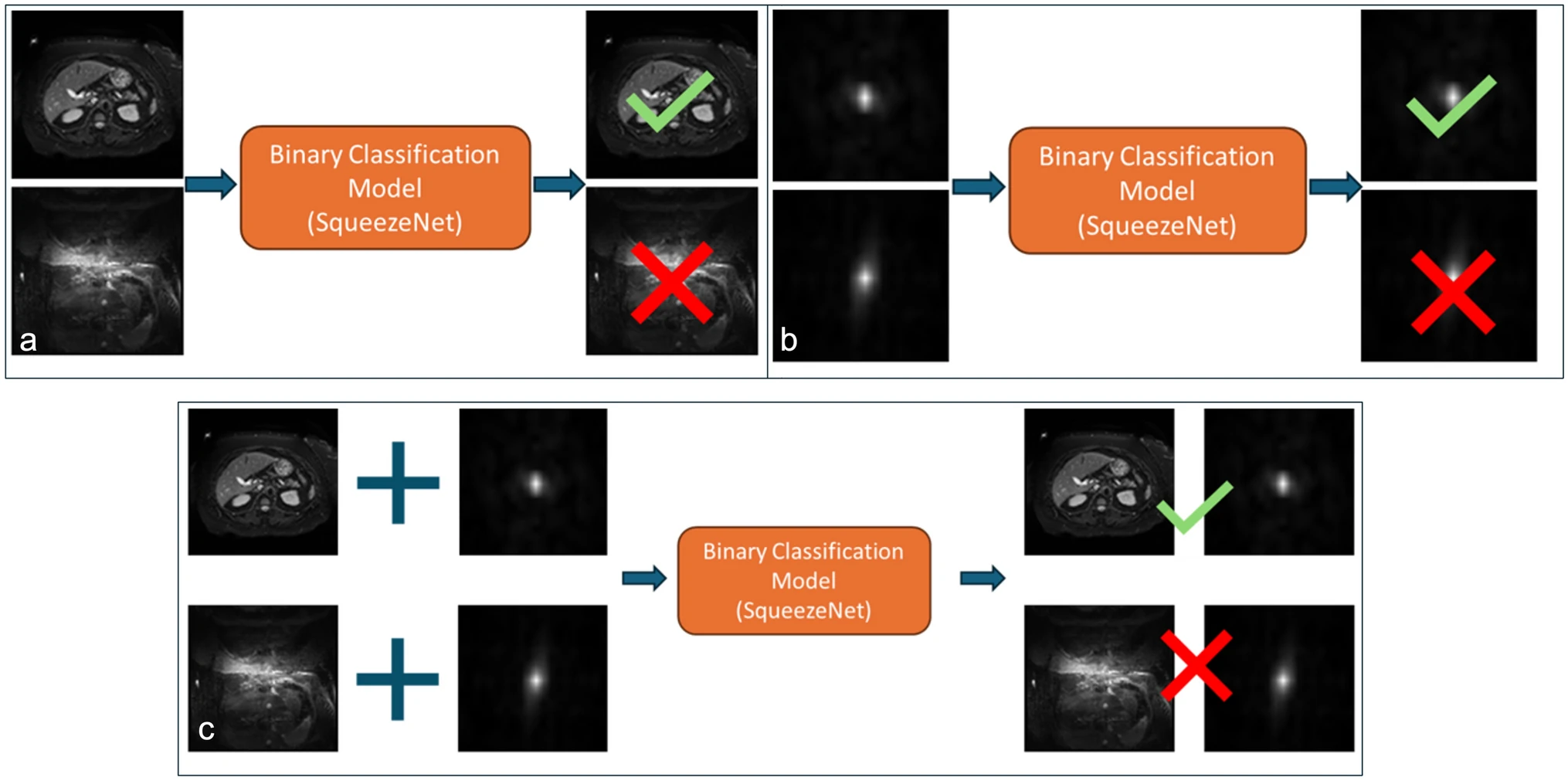
Efe Ozkaya, Heriberto A. Nieves-Vazquez, Jun Ueda, and Bachir Taouli, Automated Liver Magnetic Resonance Elastography Quality Assessment and Liver Stiffness Measurement using Deep Learning, Abdominal Radiology
Jacob Blevins and Jun Ueda, Encrypted Model Reference Adaptive Control with False Data Injection Attack Resilience via Somewhat Homomorphic Encryption-Based Overflow Trap, IEEE Transactions on Industrial Cyber-Physical Systems, , vol. 3, pp. 262-272, 2025, doi: 10.1109/TICPS.2025.3546887.
Hiroaki Kawase (former visiting scholar from UEC, Japan) receives the young researcher award from UJA (United Japanese Researchers Around the World) on his paper, Hiroaki Kawase, Waiman Meinhold, Jun Ueda, Encrypted Classification for Prevention of Adversarial Perturbation and Individual Identification in Health-Monitoring, 2023 IEEE/ASME International Conference on Advanced Intelligent Mechatronics…
This year, we will be presenting two papers on false data injection attacks on teleoperated robotic systems at ICRA 2025 in Atlanta. Jun Ueda, Jacob Blevins, Affine Transformation-based Perfectly Undetectable False Data Injection Attacks on Remote Manipulator Kinematic Control with Attack Detector, IEEE Robotics and Automation Letters, 8690 – 8697,…

https://grad.gatech.edu/news/15-georgia-tech-phd-students-awarded-fellowship-propel-stem-research?utm_source=newsletter&utm_medium=email&utm_content=Graduate%20Students&utm_campaign=Daily%20Digest%20-%20Oct.%2015%2C%202024 https://atlanta.arcsfoundation.org/ The ARCS Scholar Award recognizes outstanding doctoral students who have a record of past achievement and who show exceptional promise of making a significant contribution to the worldwide advancement of science and technology. Heriberto Nieves is a first-year ARCS Scholar who received the Wahlen Award. Nieves is a…