Lab Christmas Party 2016



Michael continues his research at the Sandia National Laboratories.
Congratulations, Dr. Kim!! Thesis title: Dynamics-Based Motion De-blurring and Panoramic Image Generation for A Compliant Camera Orientation Mechanism. The work has been supported in part by NSF grants.
Jun Ueda and Yuichi Kurita (ed.), Human Modeling for Bio-Inspired Robotics, ISBN 9780128031377, Academic Press, Elsevier, September 2016
A project submitted to the Institute for Robotics and Intelligent Machines at Georgia Tech ((IRIM) Seed Grant Program has been selected for funding. Project Title: Musculoskeletal Disorder Prevention by Robotic Constrain-as-Needed Exoskeleton (CANE) for Construction Workers. PI: Yong K Cho (CE) and co-PI: Jun Ueda (ME)

A small vibrating device added to surgical tools could improve surgeons’ sensitivity to different shapes and textures inside their patients’ bodies. Engineers have designed the small vibrating device to attach to any existing hand-held surgical tool and be used instantly, without requiring extra training for doctors. Yuichi Kurita, Yamato Sueda,…
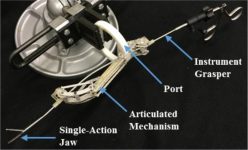
Design and Analysis of an Articulated Single-Port Laparoscopic Surgical Device, by Rohan Katoch (GT), Yoshinori Yamakawa (NITI-ON), Jun Ueda (GT) and Hiroshi Honda (NITI-ON). This paper presents a design for an articulated single-port laparoscopic device, with manipulation in six degrees-of-freedom (DOF): three rotational DOF and three translational DOF. The general…

Congratulations, Dr. Melih Turkseven. Melih is currently a Postdoctoral Fellow at the Rensselaer Polytechnic Institute.
Ilya worked at the BRHML as an undergraduate research assistant and tech temp for Spring 2014-Summer 2015 has been awarded the NSF Graduate Research Fellowship. Ilya is currently a graduate student at the University of Michigan. Congratulations, Ilya.
Congratulations! Thesis title (PhD in Mechanical Engineering): Design and Control of a Pneumatically Driven MRI Compatible Tele-Operated Haptic Interface. This work was supported by the NSF ERC Compact and Efficient Fuild Power (CCEFP).